YOLO V1原理
YOLO V1 是一个单阶段的检测算法
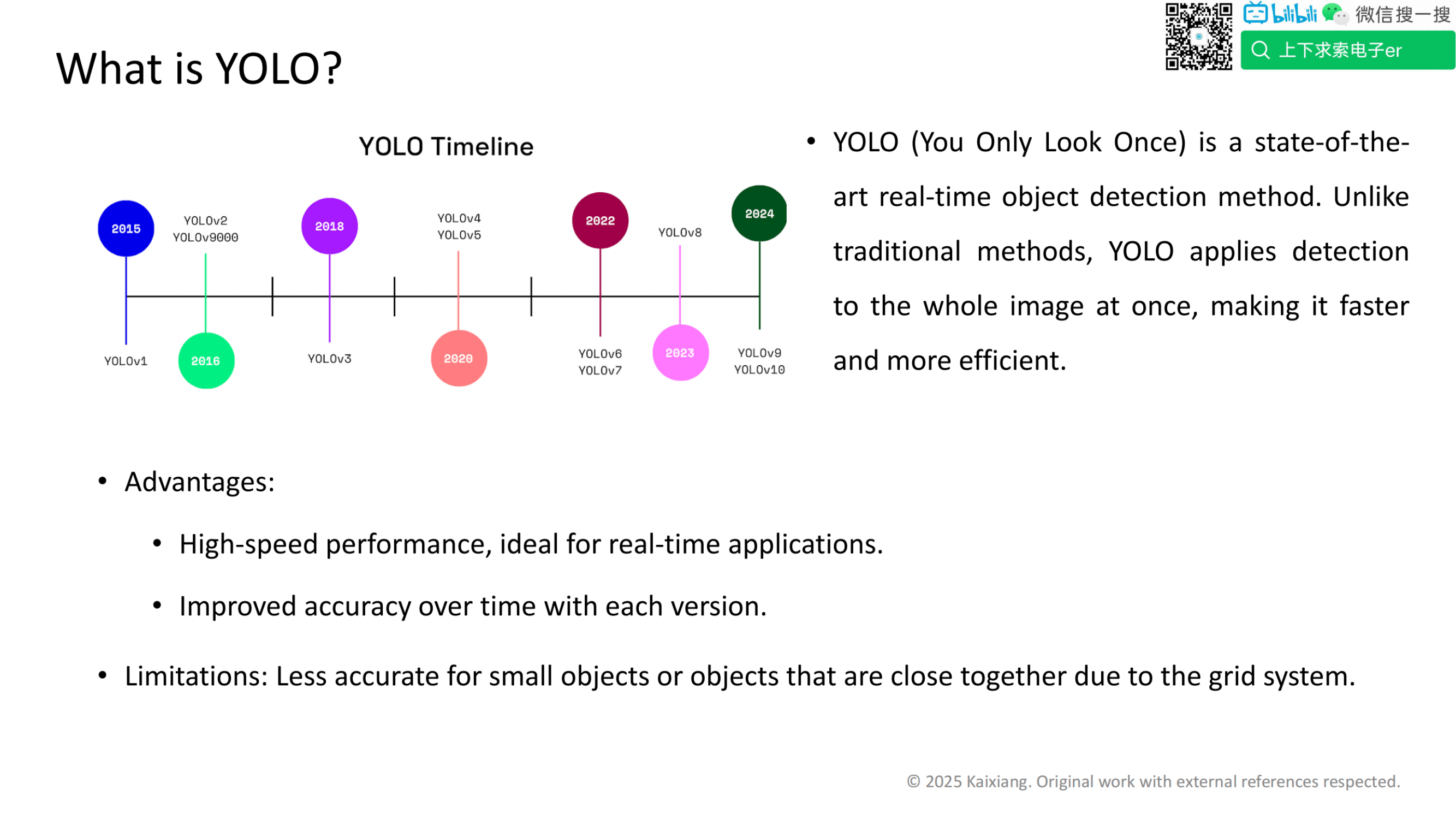
YOLO V1 对小物体,和比较接近的物体,检测准确度较差,YOLO的网格大小 会限制检测精度,尤其在物体较小或聚集的情况下


Classification 类别
Regression 边界框
Localization 定位任务
Region Proposal 区域候选: 是指在目标检测过程中,通过某种算法预先找出图像中目标可能出现的位置,这些位置被称为候选区域

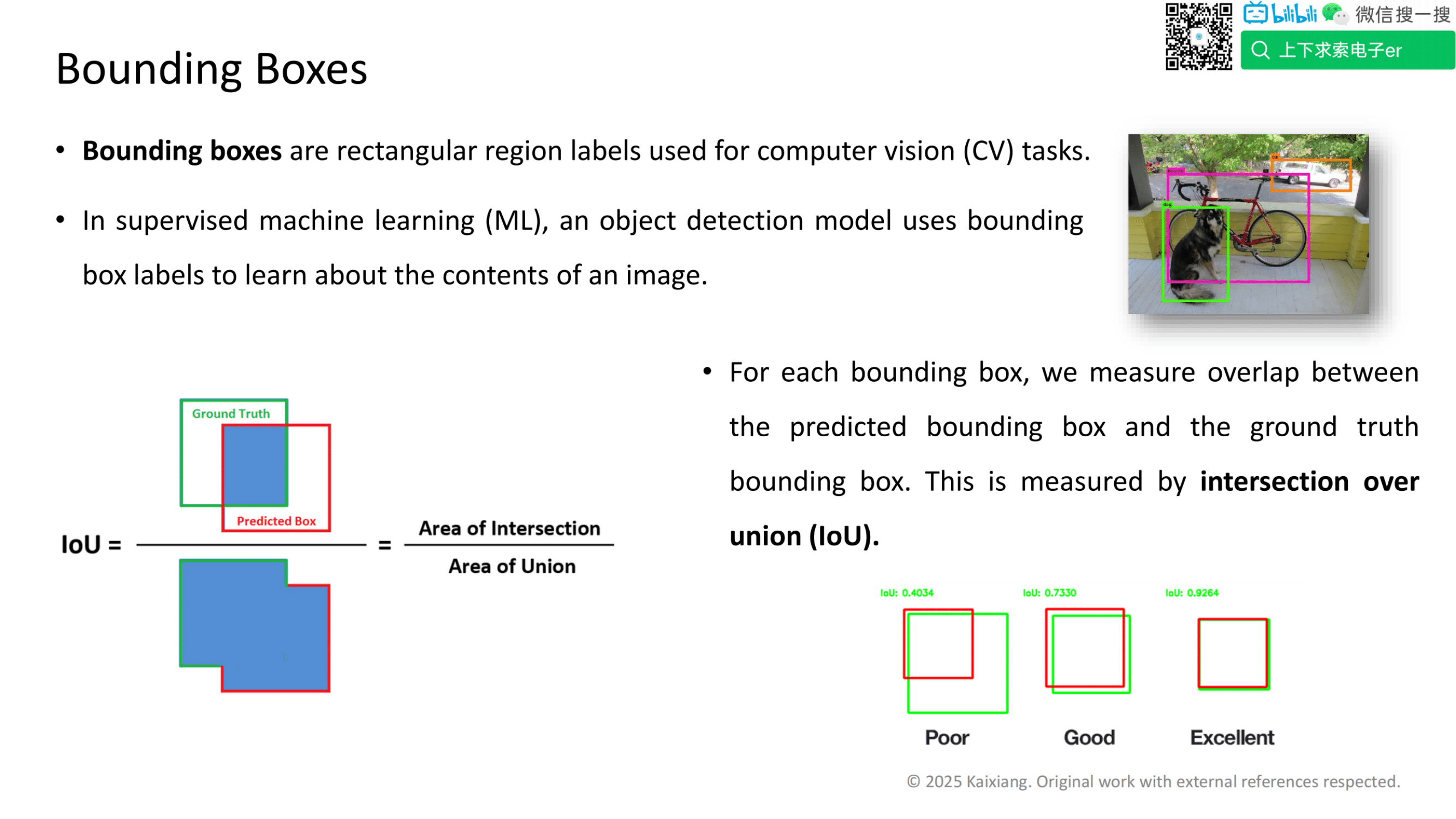
Iou 交并比 反应了预测效果(0-1)
YOLO (You Only Look Once) 是一种时时物体检测方法,对整个图像同时进行检测,不像传统的对图像进行分类后检测,这使得YOLO可以显著提高检测速度。
2015年发布第一个版本

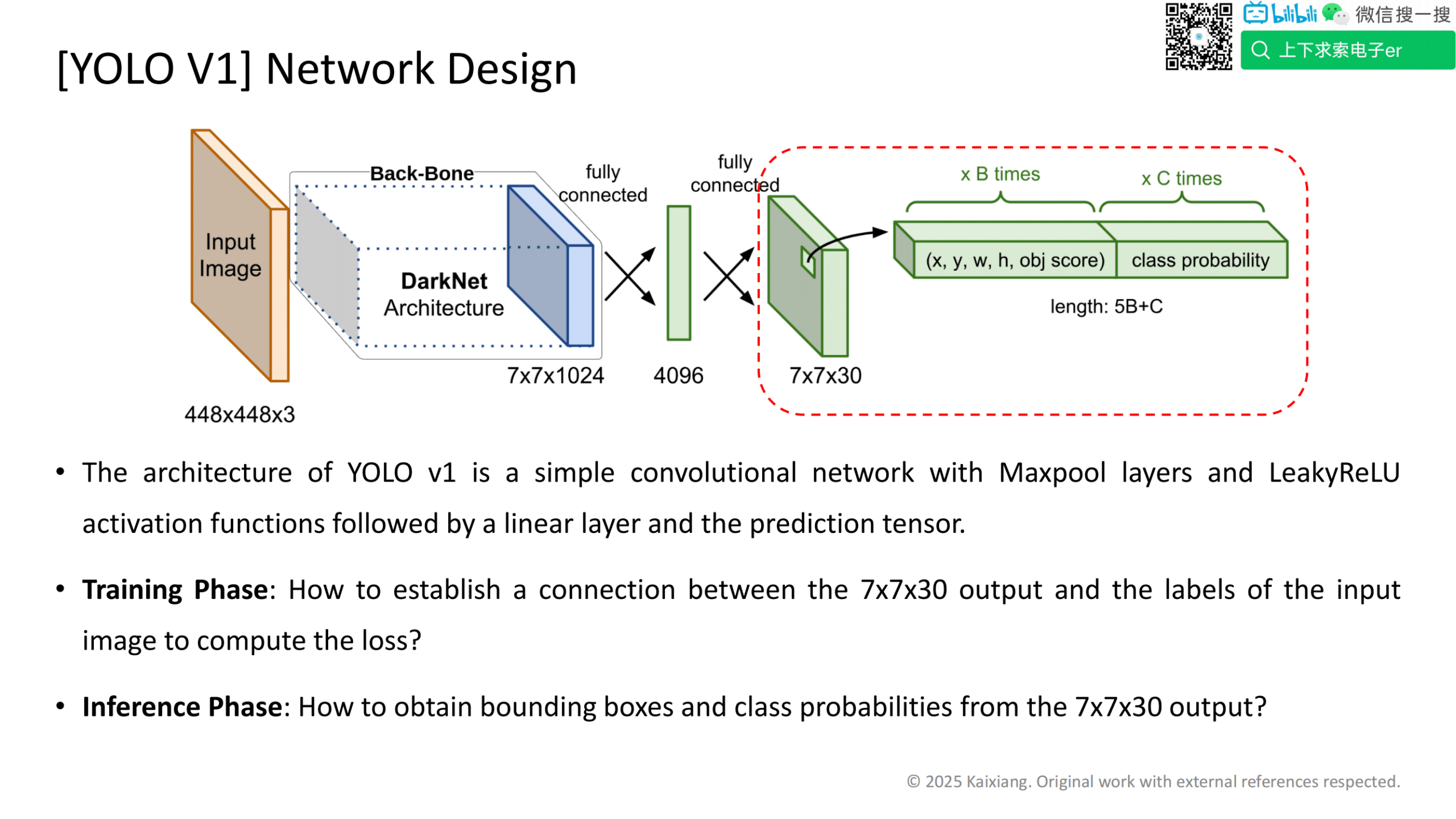
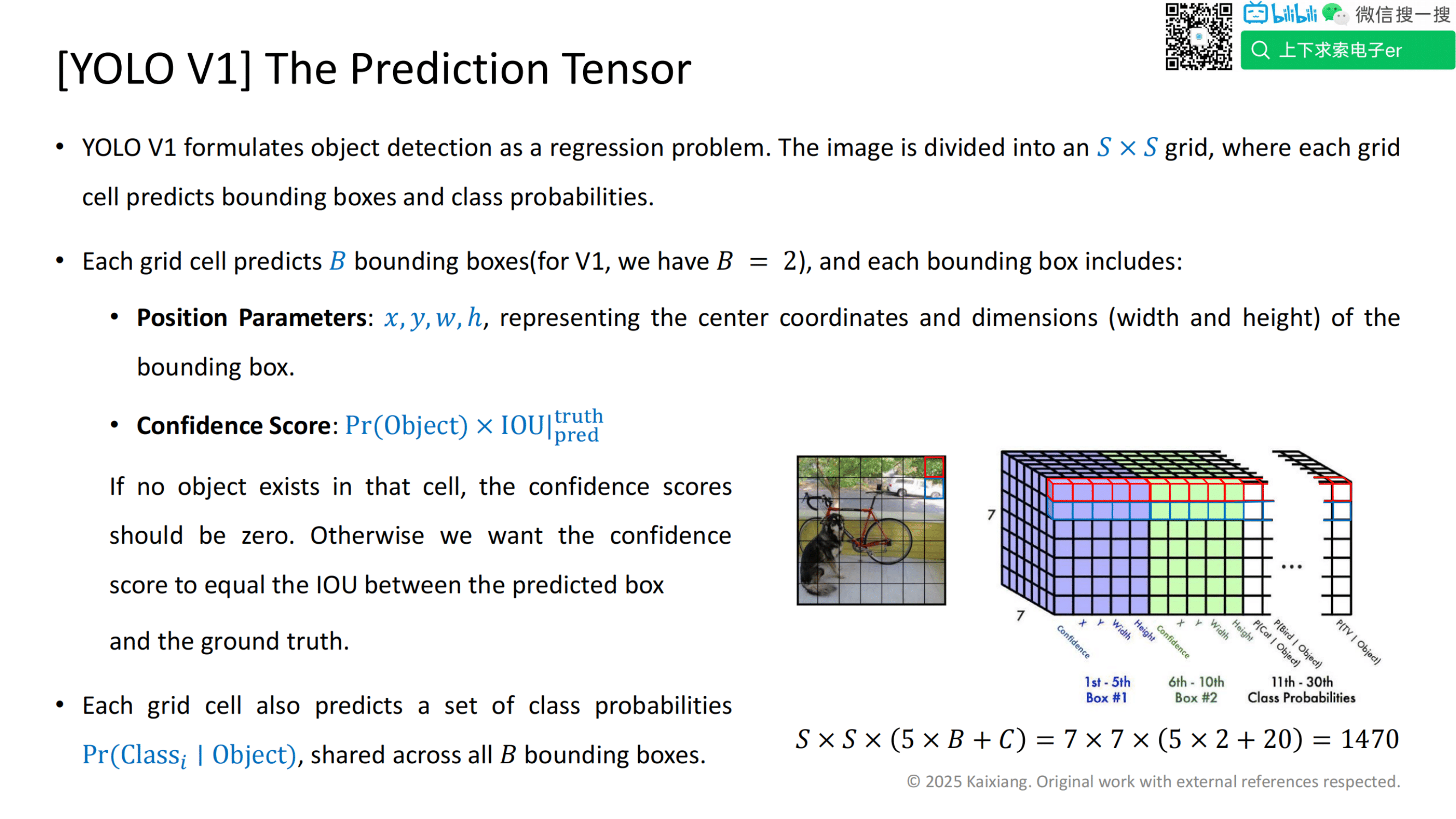
Training Phase: How to establish a connection between the 7x7x30 output and the labels of the input image to compute the loss?
训练阶段:如何在7x7x30输出与输入标签之间建立连接计算损失的图像?
Inference Phase: How to obtain bounding boxes and class probabilities from the 7x7x30 output?
推理阶段:如何从7x7x30输出中获取边界框和类概率?
If multiple objects are in the same cell, only one class is assigned for training.

regression problem. 回归问题

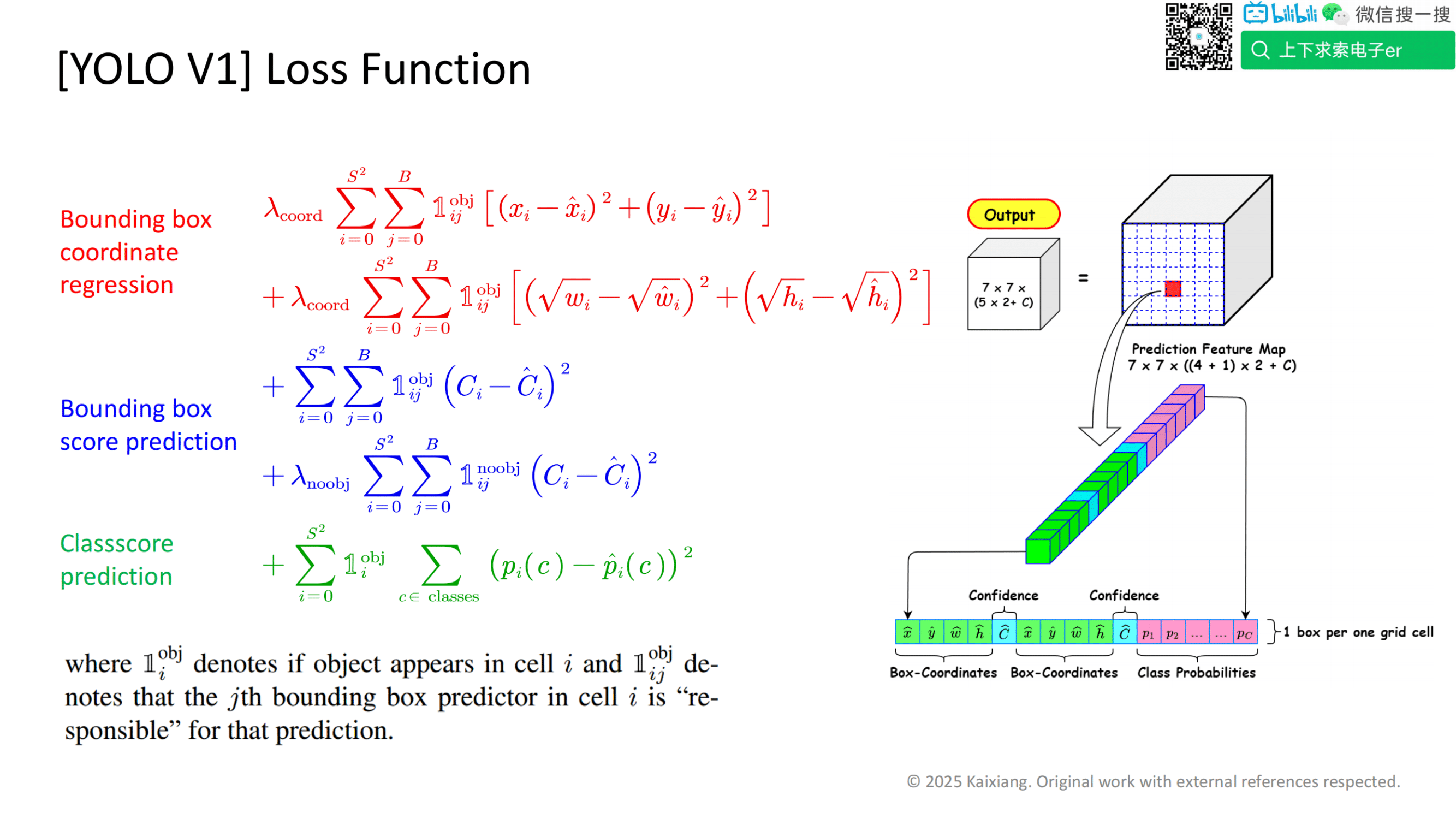
Bounding box coordinate regression
边界框坐标回归损失,用于计算真实的 xywh 和预测的 xywh 之间的差别,此处用比较简单的平方损失函数
(1 ij obj) 第i个网格的第j个box, 一个网格会生成两个box,两个box中用于检测物体的box,交并比 Iou 大的box, (1 ij obj)取1 否则 取0
用于检测的box 和 ground truth 之间的坐标回归的损失
拉姆达 λ 是为了调解不同损失之间的权重 值 为 5
Bounding box score prediction
边界框得分预测损失
用于计算物体存在的置信度误差
Ci 是网格中存在物体的概率,Ci 取1 否则取0
(1 ij nobj) 第i个网格的第j个box, 一个网格会生成两个box,两个box中 不用于 检测物体的box, λ 是为了调节不同损失之间的权重 值 为 0.5
Classscore prediction
类得分预测损失
用于计算物体类别的置信度误差,预测类别概率于实际类别的概率之间的差异
(1 i obj)如果有某个物体的中心落在第i 个 网格中,这一项取1,否则取0,取1 就会计算后面的平方损失
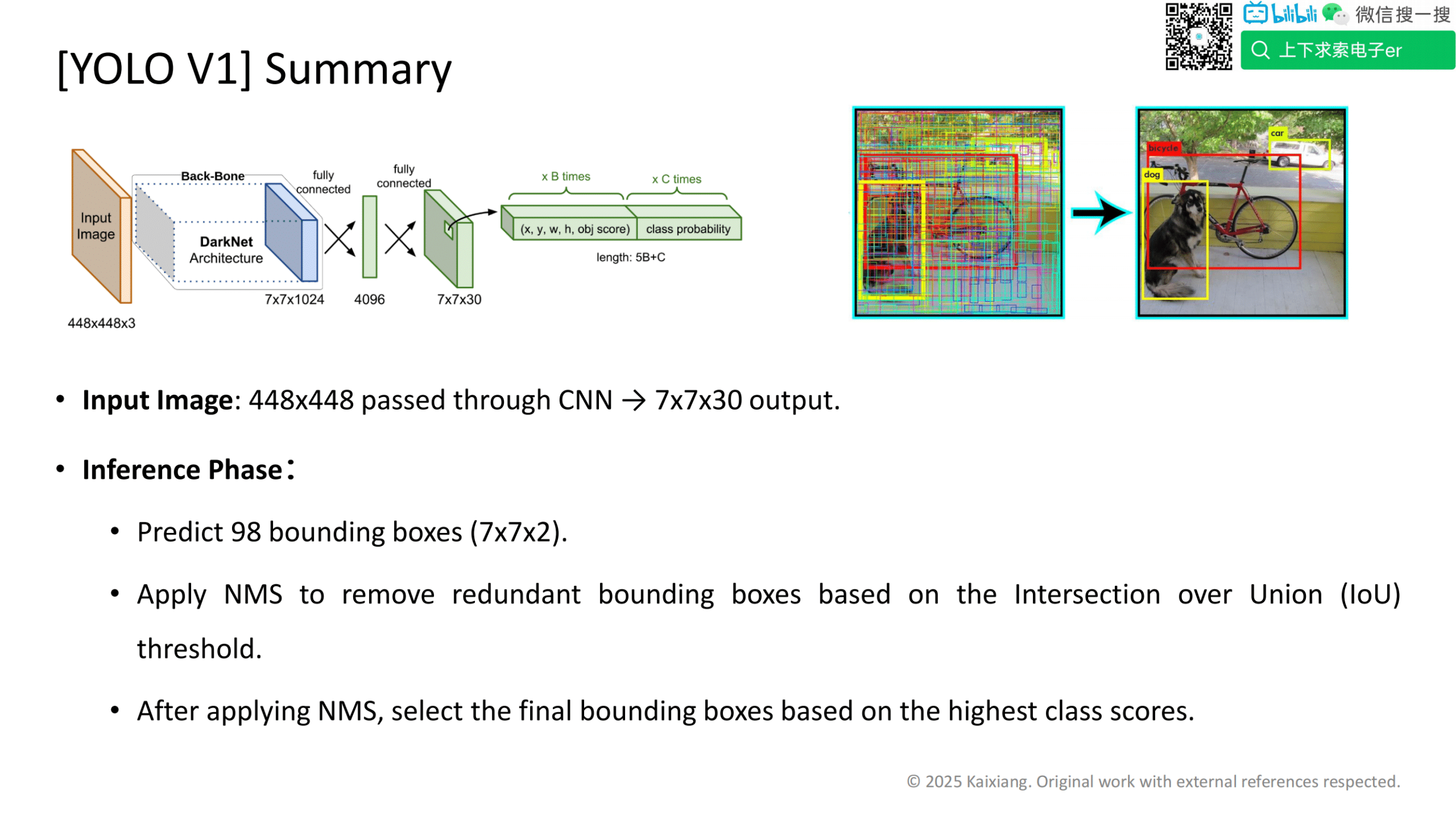
推理阶段 每个 网格 都有 2个 bounding box
(图一)772 = 98个 bounding box,每个 bounding box 都有一个置信度,我们用粗细来区分了不同的置信度,置信度越大就越粗
(图二)同时我们还可以得到 每个 bounding box 的 类别概率,右侧的有计算公式
中这个 网格里有物体的情况下 是第i个类别的概率 条件概率 * 网格中有物体的概率 * 预测框和真实框之间的Iou
= 网格是第i 类的概率 * Iou

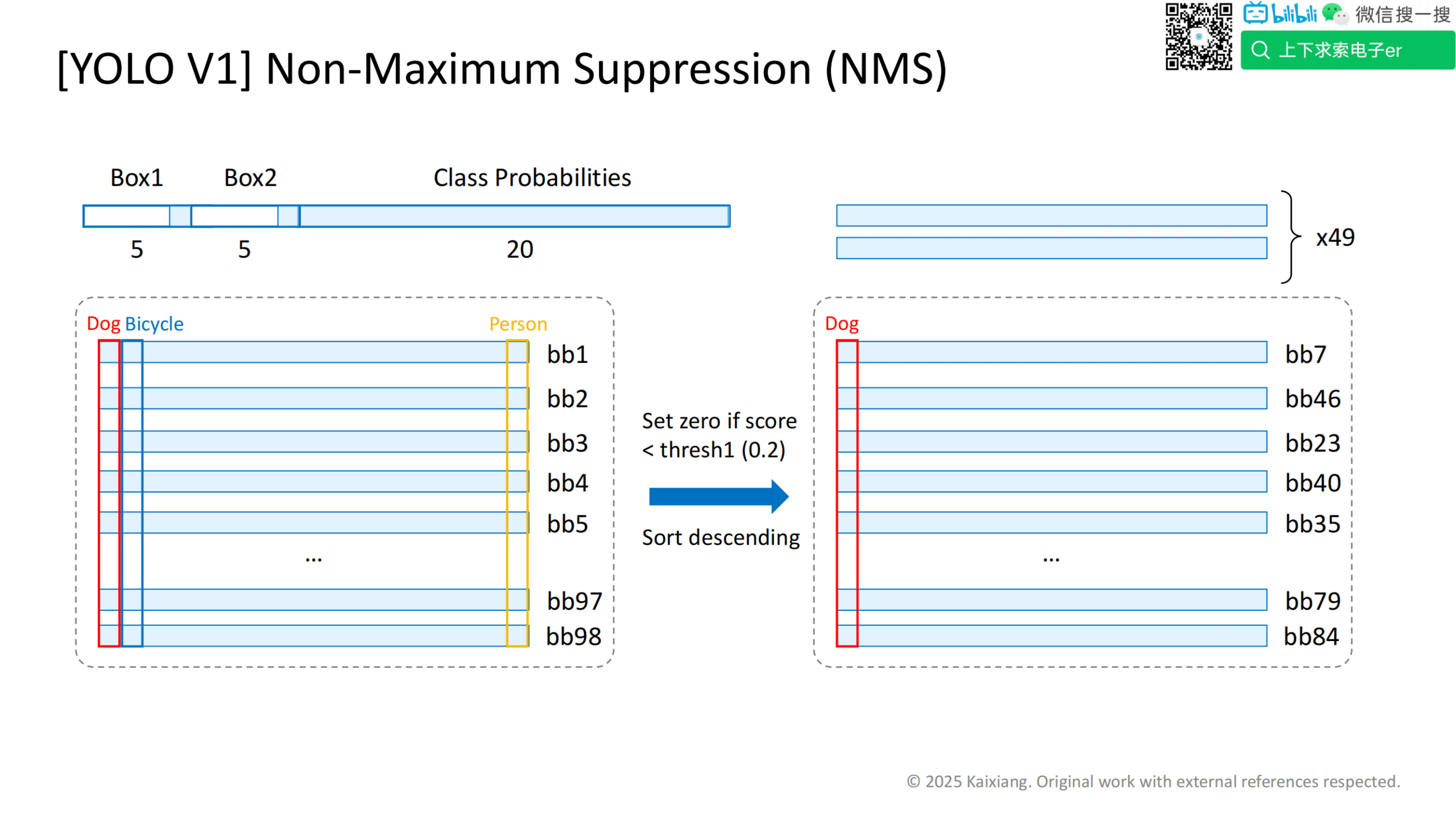
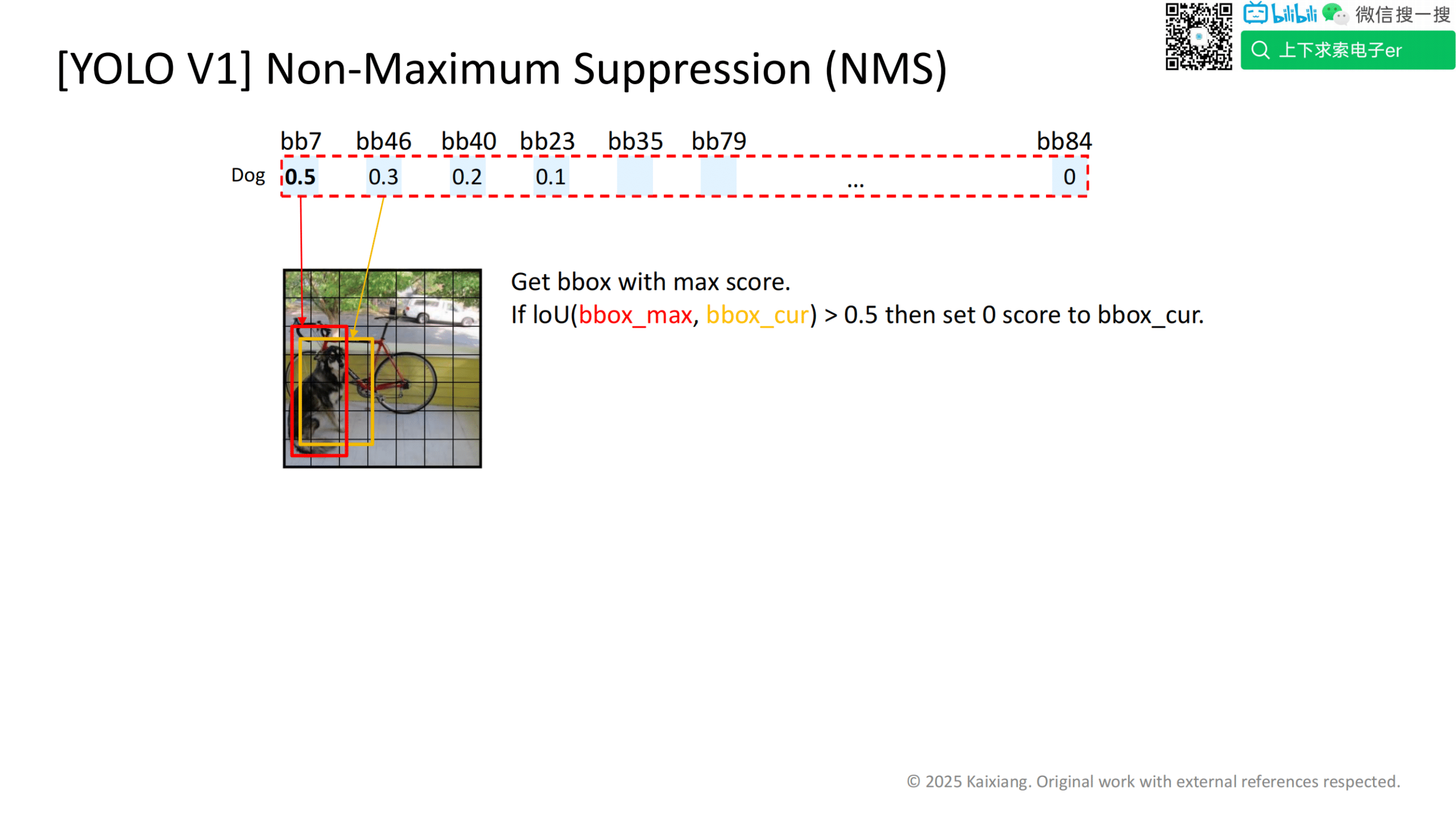
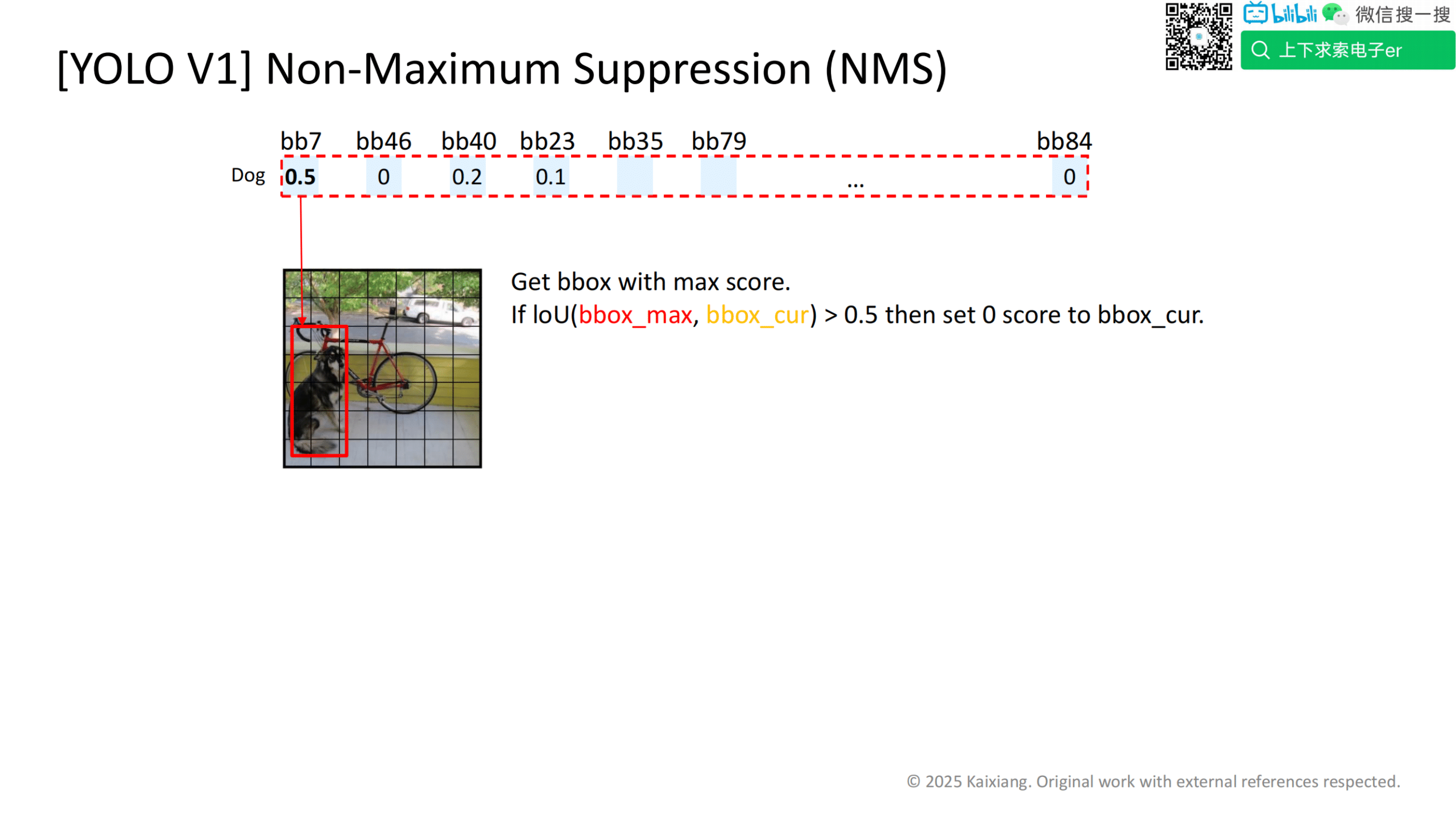
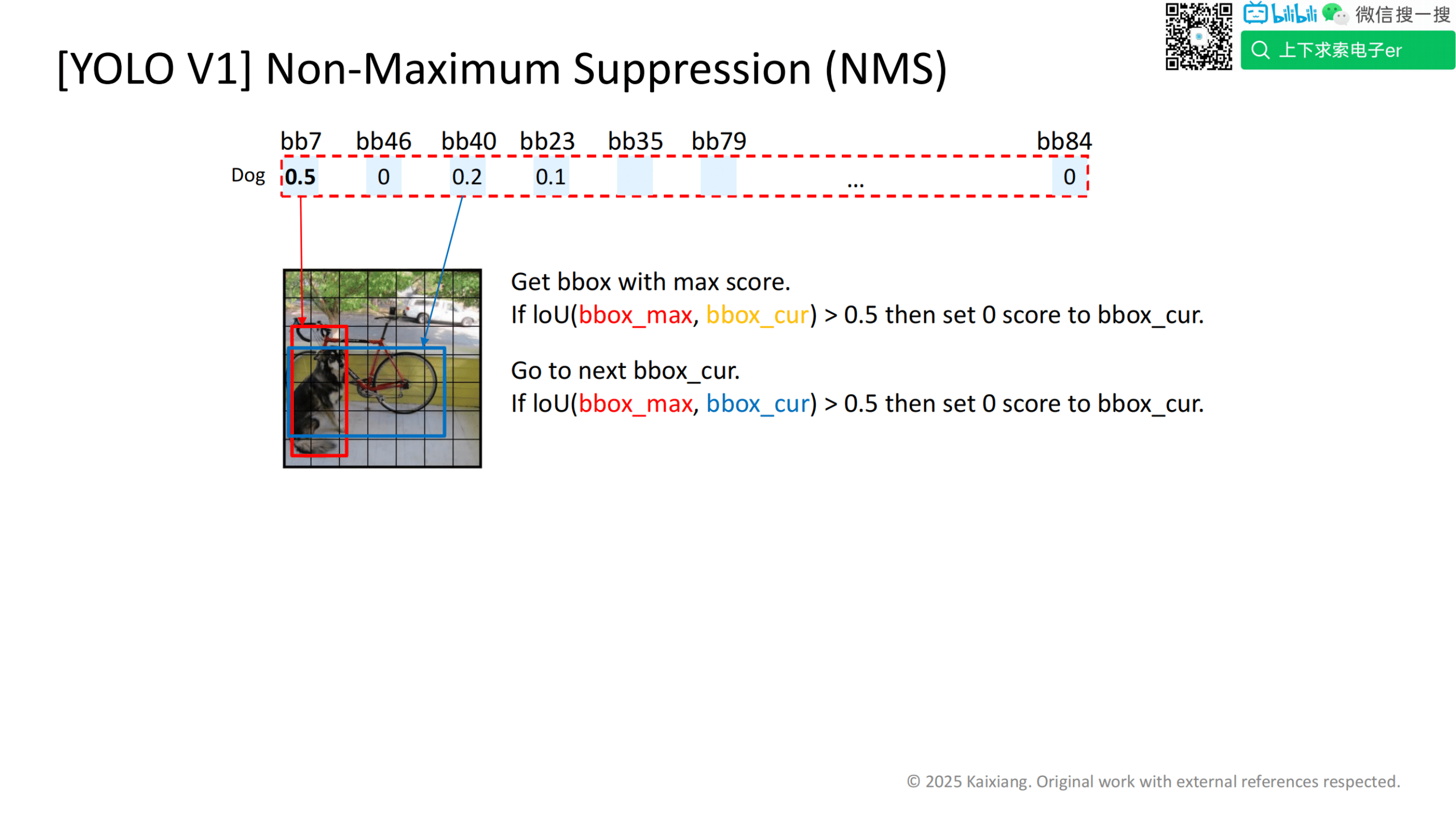
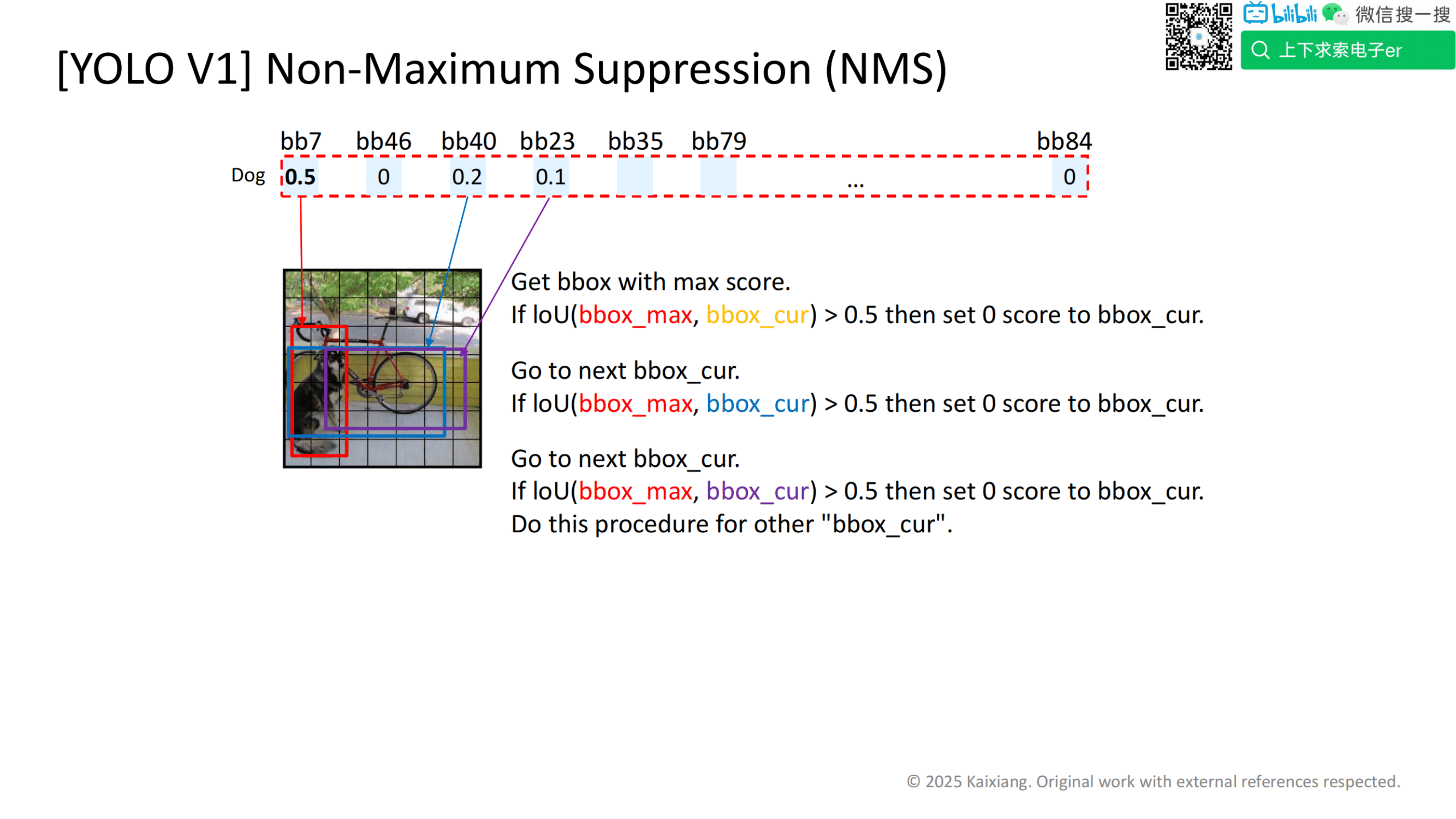
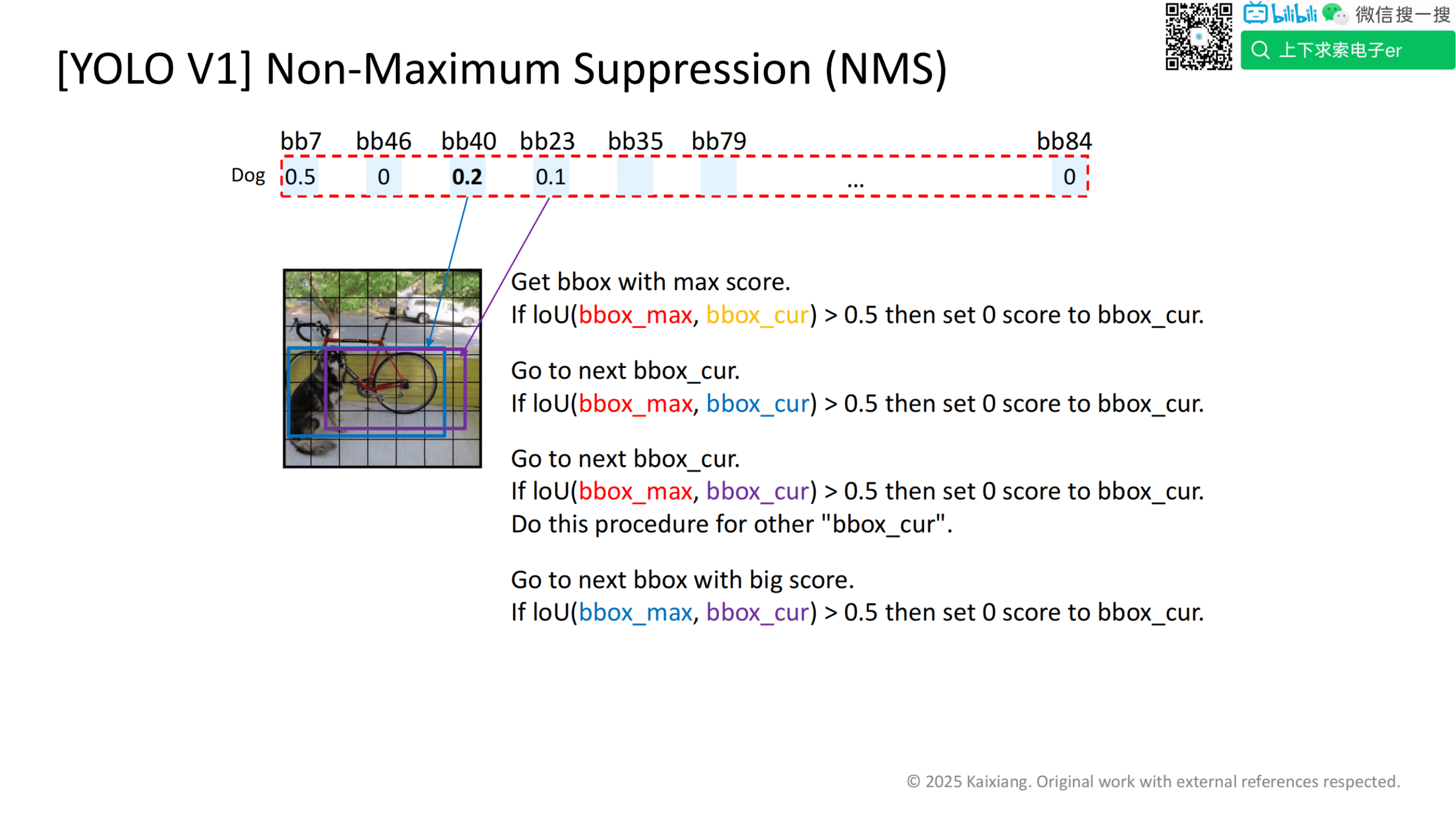



NMS 非极大值抑制,移除那些多余的 bounding boxes, 仅保留具有最高置信度的 bounding boxes